Nøkken
is a supernatural being that lives in small inland waters and is a shapeshifter.
It tries to trick people into drowning, often by changing shape into a horse, which
when mounted would charge into a lake and take you to the bottom with
it. I've never liked water, and a certain illustration by Theodor
Kittelsen came to mind when I saw the LEDs glowing.
30th July 2012
This project builds upon my experiences with Nøkken mark I and II,
which were able to provide some footage but either leaked in shallow
water or failed outright. In the first iteration of Nøkken the battery
was inboard and a thin tether was used, motors and LED power was sent
through homemade feedthroughs. This worked quite well, but there were
leaks in the feedthroughs, the lid used to access the battery, and in a
crack which developed after only being submerged two meters. This
showed me that I could not rely on my homemade wire feedthrough, nor on
the body of the vessel itself. I decided to move the battery on land,
and pot the entire setup in wax. This would allow me to completely seal
the unit once, and without a compressible substance inside of the ROV
there would be no place for water to leak into. This would have worked
alright, had the wax actually provided a good seal, rather than shrink
and crack. With the small air pockets left by the wax, water was able
to leak into the feedthroughs once again, wreaking havoc on the
electronics. Not only that, but the new umbilical cord required 14AWG
wire to send 12V at up to 10A down to the ROV. The cord was so heavy
the motors were unable to move the ROV, and instead it had to be
dragged about. Taking wisdom from this, I had a few new ideas for the
next iteration of Nøkken:
* Use prefabricated cable/connector for ALL wire feedthroughs.
* Use a single, thin, umbilical cord
* Use a redundant waterproof camera, along with a navigation camera
* Pot with something other than wax
The first thing I did was fix the tether problem. The cat5 cable I used to
begin with worked flawlessly and was easy to procure. Since I only use
four of the eight wires in the cable for video and communications, it
was an obvious choice to use the other half of the cable to send power
down to the ROV. The problem is that the loop resistance is 24 Ohms
with the 30 meter cat5e cable I had, with doubled up pairs. The ROV
operates at 12V and requires 10A when all motors are running and the
LEDs are at maximum power. The solution is to use a high voltage across
the cable, which in my case was 130V DC. This was done using a
run-of-the-mill 12V-to-120V 150W inverter. At the ROV a switch mode LED
power supply intended for mains operation was used to step down the
voltage again. This was cheaper, better and faster than trying to
design something myself, and it works perfectly. The video signal did
not like having a noisy power line as a neighbor in the umbilical cord,
a problem I fixed by full-wave rectifying the output of the inverter.
Since the cheap inverter used a squarewave approximation of a
sine-wave, the rectified and filtered result was near perfect DC. Like
with the previous ROVs, the video signal is simply sent raw through a
twisted pair in the Ethernet cable, and converted by an EasyCap USB
device. The software I use for this is VirtualDub. Communications are
provided by a FTDI USB UART with RS-485 converter, also sent down a
twisted pair in the Ethernet cable.
A GoPro Hero HD2 was chosen as the redundant camera. The reason for
choosing it was the standard issue waterproof housing which is rated
down to 60 meters, small form factor, and heavy marketing campaign.
(Seriously, I see these cameras in the strangest places.) This camera
will be set to record to an internal memory card, and will record
everything regardless of whether the ROV itself is controllable. The
low-light performance isn't quite what I had hoped for, so a redundant
lighting system may have been a good idea as well. It turns out the
stock housing distorts the image underwater, so for the GoPro to
actually be useful I need to buy a new diving housing.
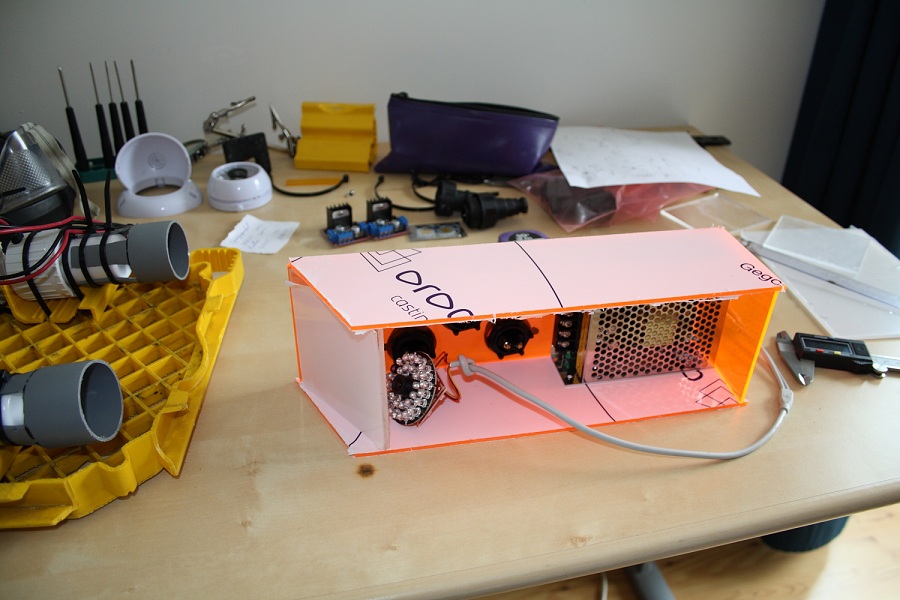
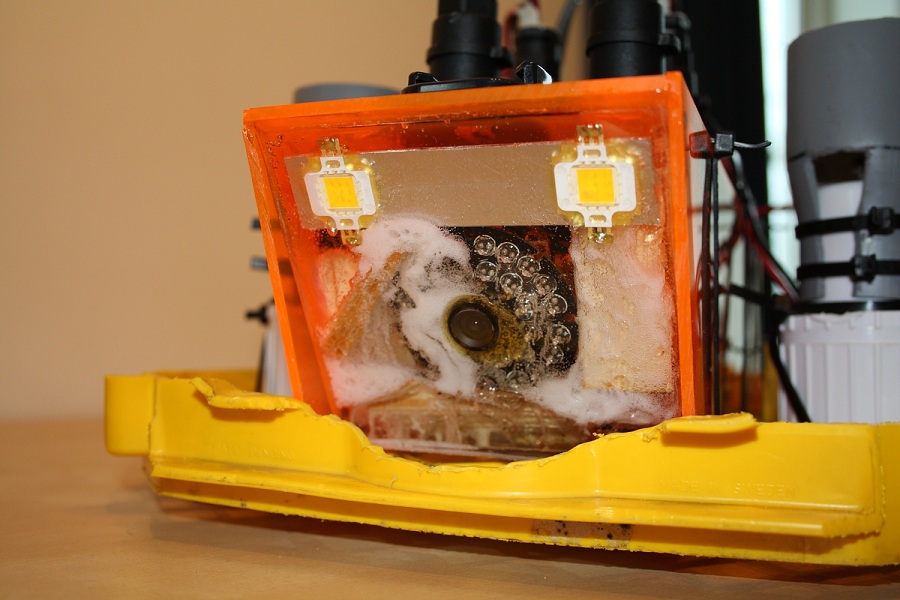
The ROV housing itself was constructed using a sheet of plexiglas, which
was welded first using acetone to hold the pieces in place, then glued
later with epoxy. The potting substance used this time is laminating
epoxy, commonly used to repair fiberglass constructs in marine
applications. It's very expensive, but resilient and easy to use thanks
to it's low viscosity. I made the mistake of not minimizing the potting
volume before I starting pouring the epoxy. I had purchased 1,8 liters
of resin thinking it would be more than enough, but I quickly saw that
was not the case. With the insane cost of the stuff I was not willing
to buy another batch, so I quickly chopped up some blocks of wood which
I threw into the ROV shell. I'm not sure if the resin is simply
exothermic while hardening, or if it reacts with wood, but either way
this resulted in a foamy mass forming around the wood blocks. I don't
think this will be a problem, but it doesn't look good. Had I known
this before hand I would have used sand as fill mass, since it is
chemically inert and inherently waterproof. "Standard Buccaneer"
connectors from Bulgin were used for all connections on the ROV. This
includes the motors which are permanently fastened. These connectors
are waterproof down to 100 meters for 12 hours if assembled correctly.
The LEDs were mounted inside of the ROV to save on connectors and the
added complexity of waterproofing them.
As I mentioned at the end of the mark I and II article, I had problems
with Microsoft's .NET update. For the sake of reliability I simplified
the PC software and ROV firmware so only one-way communication is
possible. The ROV will now only receive motor control and LED
brightness packets. Two prefabricated L298 motor controller boards are
used to control the motors. Any similar H-brigde motor controller unit
can be controlled by the ATmega8. The schematic for the control board,
firmware for ATmega8 and corresponding windows software can be downloaded
here.
First Dive!
I took the ROV out to the coast again this year to try it out. I dare say
it was a great success, even without HD video from the GoPro.
Update 27th February 2017
I should have posted a follow-up to this a long time ago, as the details are fuzzy after all this time.
However, the Nøkken MKIII is no more. After the dives in the video above, leaks started to occur in the connector, which
is why the video feed cuts out at times. I found after the dives that the connector became very hot during use,
and discovered that salt water had leaked inside and caused a minor short between the two high voltage prongs.
Last summer I investigated bringing this ROV back to life, with a raspberry pi based tether station instead of
a laptop. Unfortunately, severe internal corrosion had occurred, and the electronics no longer function. The unit
will power up, and send video, but micro-controller cannot be communicated with, leaving LED brightness and
thruster control unavailable. This was rather sad, as I had hoped to give this ROV a new life.
Did this project whet your appetite for ROVs? If so check out these
links, and you'll be building one in no time.
Disclaimer:
I do not take responsibility for any injury, death, hurt ego, or other
forms of personal damage which may result from recreating these
experiments. Projects are merely presented as a source of inspiration,
and should only be conducted by responsible individuals, or under the
supervision of responsible individuals. It is your own life, so proceed
at your own risk! All projects are for noncommercial use only.





 This work is licensed under a
Creative Commons Attribution-Noncommercial-Share Alike 3.0 Unported License.
This work is licensed under a
Creative Commons Attribution-Noncommercial-Share Alike 3.0 Unported License.