After much work I finally got the noisy RF link to work reliably. I had
originally thought to make my own RF modules from scratch, but I later
scrapped the idea when I found out how cheap real RF modules can be had
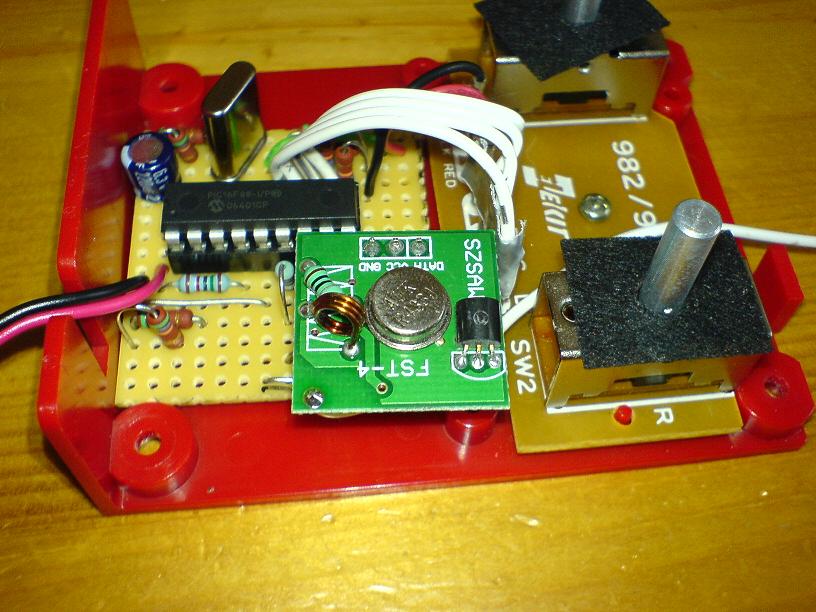
on ebay. So I bought a TM1000-1 transmitter and RM1SG
receiver for a few dollars. The modules weren't as easy to use as I had
thought, and unlike a IR modules they send out lots of noise without a
steady input signal. Also the RF module I used had long start-up and
power down period after receiving a high pulse. To counter all of this
I kept the receiver in constant standby mode, but sending a information
all the time. That way the noise is flooded out, and the receiver will
always respond. I had been trying all sorts of error detection methods
and different ways of encoding the bytes, when I just gave up. Since
the link is so noisy I decided to cut out all of the error detection
methods and just make it accept anything it receives, and see what
happened from there. But what do you know, it worked!
How it works:
Unlike the IR transmitter I made, the RF transmitter is designed to
constantly send the status of it's inputs. 1) because the link is
noisy, and there is a good chance the byte will be corrupted. 2) the
receiver passes out if no input is received within a few milliseconds
of a previous input, and doesn't accept new input until a few hundred
milliseconds afterwards. So the receiver is made to recognize a
startbit so it knows where the transmission began, it then measures the
pulse length, and determines whether it's a 1 or 0. Just like the IR
controller. Unlike the IR controller, if a false bit length is sensed
the RF receiver ignores it and leaves the value of the array as it was.
Meaning if the RC car is moving forward, and the bit which corresponds
to forward it corrupt the car will keep moving forward. The benefit of
this is that with bytes being sent constantly corrupt bits will be
replaced by correct ones quickly. So even if an entire transmission
fails, a new transmission comes right afterwards. Sort of a brute-force
method, but it gets the job done quickly and simply.
I think I commented the code even better than the IR controller, so
just check the source for a more in depth explanation. (It's in
basic, written with Mikrobasic)
The firmware is designed for two PIC16F88's, but with very few software
changes any PIC can be used.
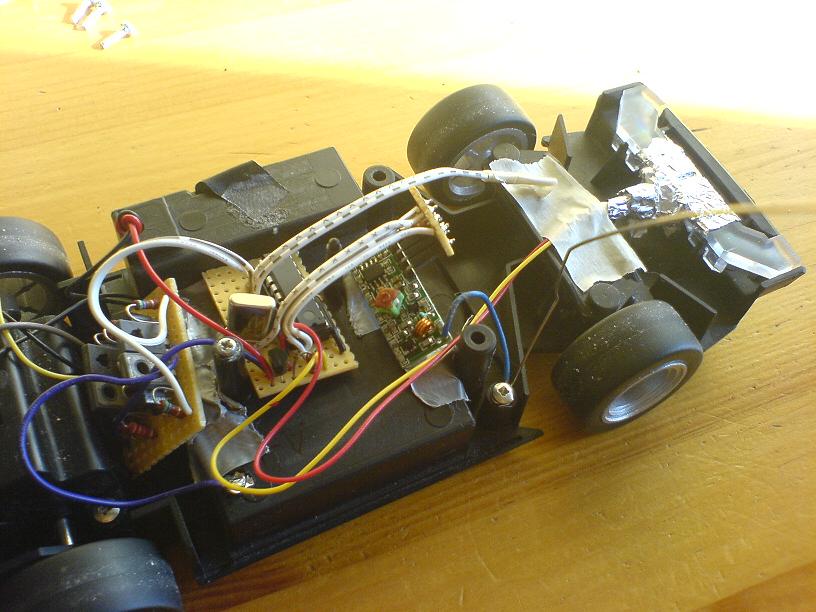
To test the setup I modded the RC car I used with the IR remote control
system. The range seems to be good, although I haven't tested it at
more than 15 meters yet. The transmitter boasts 1km of range under
ideal conditions, so I can count on this working anywhere in the house
at least. Plus I don't have to run after the car and point at the IR
module anymore.
Disclaimer:
I do not take responsibility for any injury, death, hurt ego, or other
forms of personal damage which may result from recreating these
experiments. Projects are merely presented as a source of inspiration,
and should only be conducted by responsible individuals, or under the
supervision of responsible individuals. It is your own life, so proceed
at your own risk! All projects are for noncommercial use only.


 This work is licensed under a
Creative Commons Attribution-Noncommercial-Share Alike 3.0 Unported License.
This work is licensed under a
Creative Commons Attribution-Noncommercial-Share Alike 3.0 Unported License.